Blog
コンフィギュレーション機能・テーブル機能を使おう
2024/06/27





はじめまして、機械設計を担当している遊免と申します。
弊社では3DCADソフトSolidworksをメインに設計業務を行っています。
構想段階から詳細設計、製作図面まで活用しており、(一部図面機能に不満のあるものの)非常に便利で、自分の能力以上の設計が行えていると感じております。
Solidworksは便利なソフトですがそれ故に機能が多く、公式のヘルプページはありますが、わからないところがわかない状態だと解決が難しいと感じています。インターネット上の教材も(特に日本語だと)少ないので使いこなせていないなぁ…と日々感じるのが現状です。
そこで今回はSOLIDWORKSの機能の一つ、「コンフィギュレーション機能」についてご紹介させていただきます。
弊社が使用しているDENSO Wave社の6軸ロボットになります。3Dモデルが提供されており設計に活用できます。
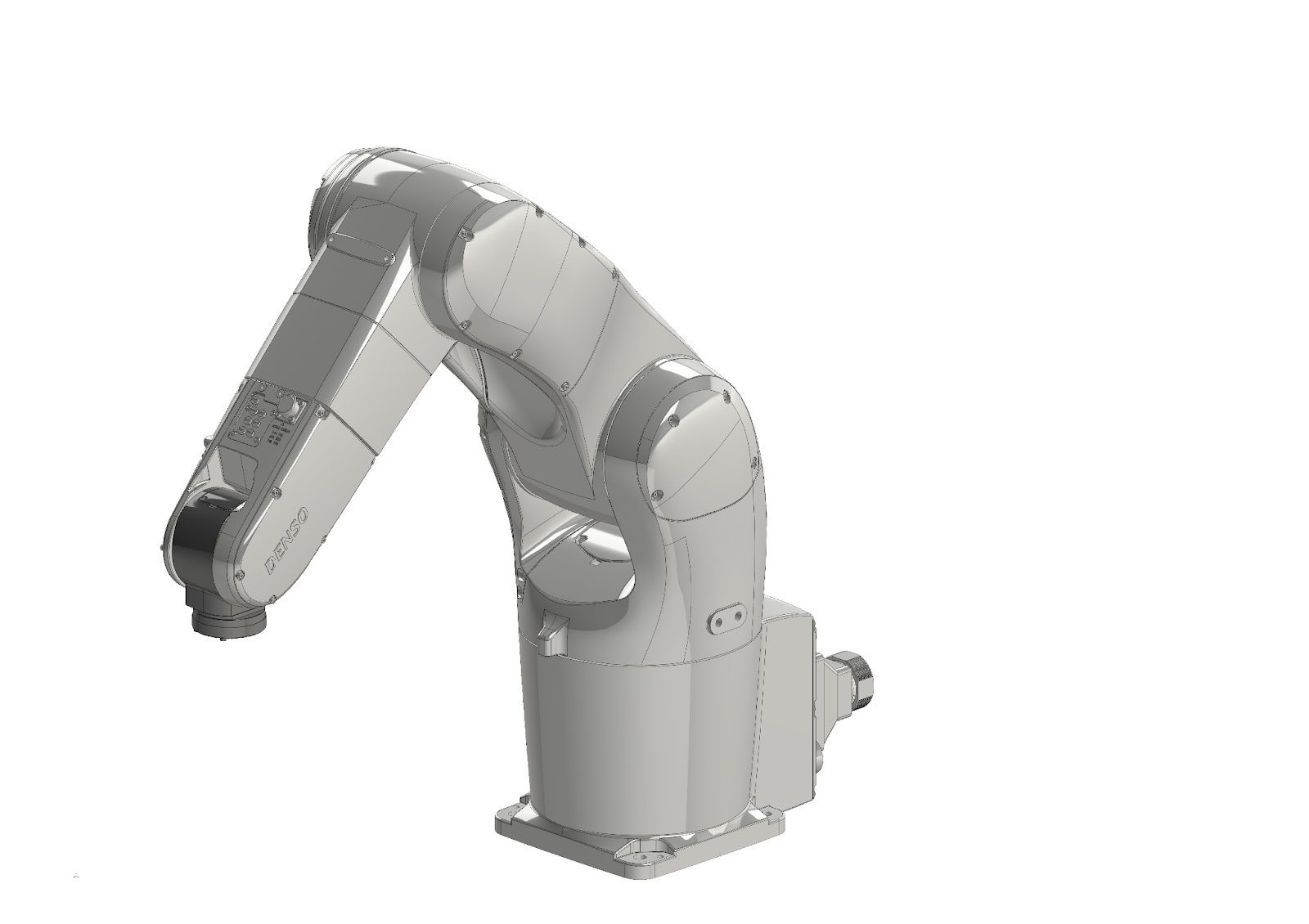
ロボットが一般的な機械設計と異なるのが、ある範囲で自由に動作を行えるという点かと思います。様々なポジションを設定でき、その際にその付属品、例えばハンドや先端についた機器等がどういうポジションにいるのか、どういう向きになっているのか等が変化する点です。
例えば、
すべての動作についてそれぞれ角度拘束を行い、当たりや干渉について確認することももちろん可能ですが非常に手間がかかり、どの拘束がどの軸を管理しているのかの把握に脳のリソースを割かれてしまいます。
それをSOLIDWORKSだけで簡易的に確認できると便利だと思いませんか?
そこで私がよく使うのがコンフィギュレーションという機能です。
本来?はバージョン違いの製品を一括して製作するための機能でありそれぞれ拘束の抑制・抑制解除を管理してくれる優れモノです。
この機能を用いてそれぞれの軸を管理していきましょう。
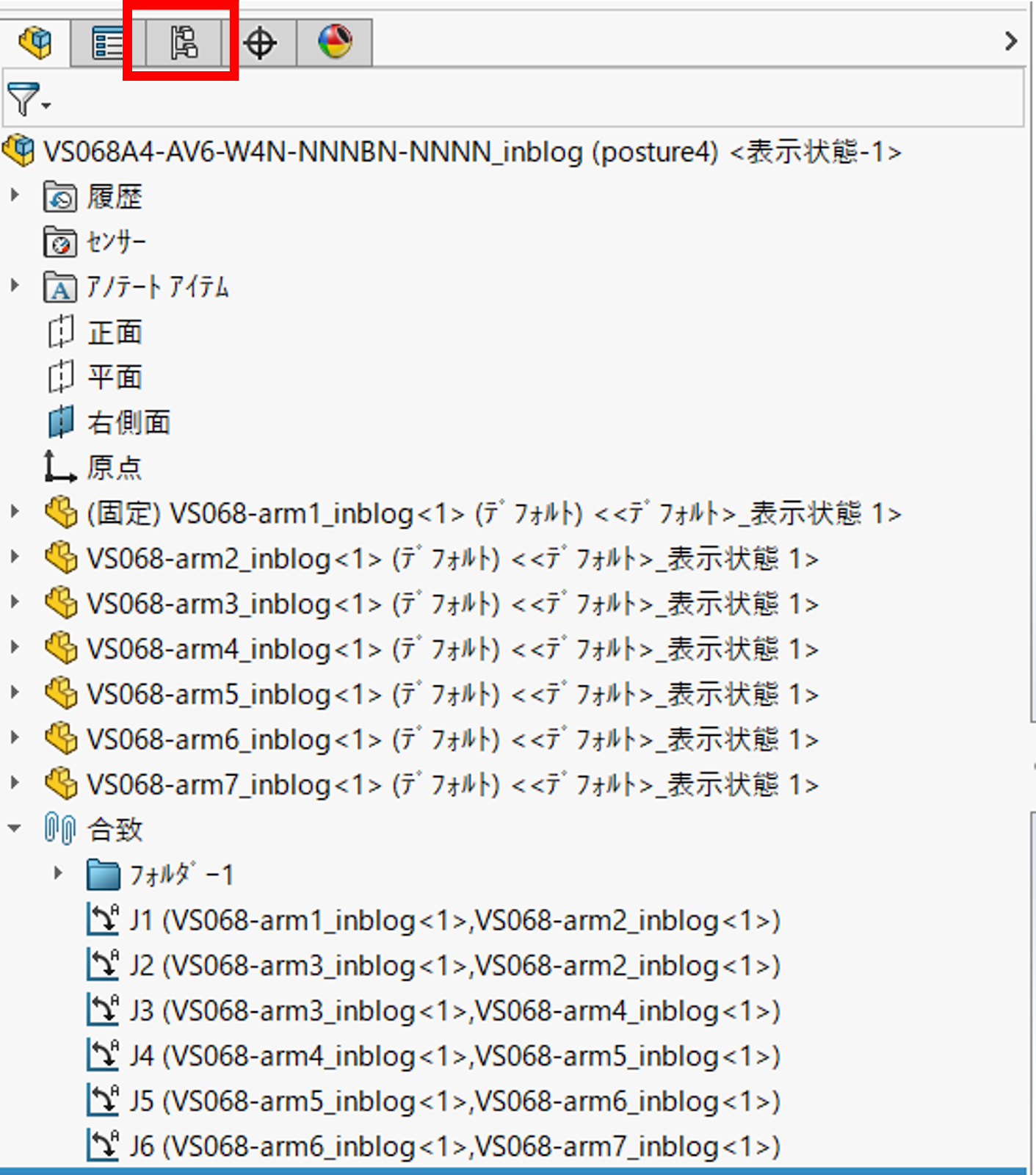
SOLIDWORKSの基本画面であるFeatureManagerデザインツリーの2つとなりにConfigurationManagerは佇んでいます。

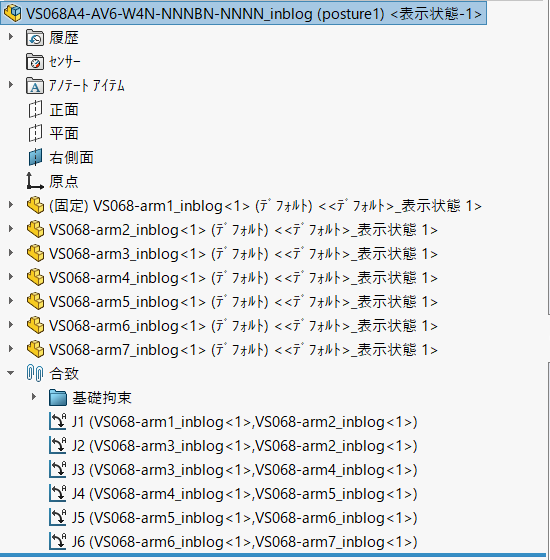
ConfigurationManagerでは各名称のコンフィギュレーションをダブルクリックするだけで予め設定された拘束に変化してくれます。
(ちなみに設計テーブルを新規で作成する場合は
「挿入>テーブル>Execl設計テーブル」で設計テーブルを作成できます。)
ここで用意する角度拘束はたった6つだけ
RC8のJ型変数と同じ動作をさせるのでJ1~J6を作成しています。
設計テーブルは以下のように記載されており
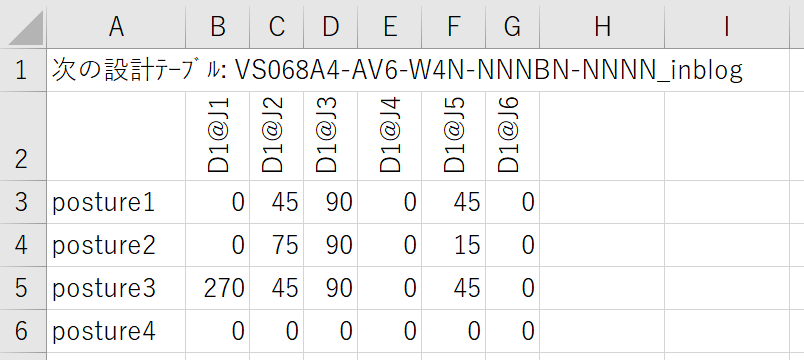
それぞれのセルについて意味を説明すると、D1@J1の縦軸は「拘束J1のD1という変数を以下のように定義する」
また、posture1が書かれた横軸は「角度拘束の角度に定義する数値」を示しています。
(0°の位置と回転方向については角度拘束内での定義が必要です)
つまり、posture1のコンフィグレーションを選択すると
J1が0°、J2が45°、J3が90°、J4が0°、J5が45°、J6が0°に定義されるよということです。
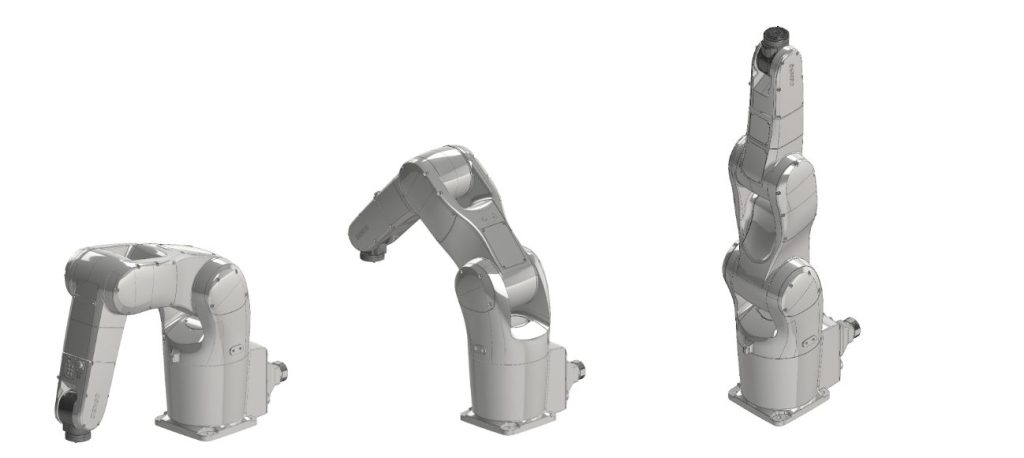
今回の例でいうとposture1が「基本姿勢」、posture2が「ピッキング」、posture3が「退避」、posture4が「伸び」という姿勢を示しています。
こうすることでダブルクリックを行うだけで予めテーブルに入力されていた角度に各拘束が定義されそれぞれの姿勢についてシミュレーションすることができます。
今回の執筆に関して以下のサイトを参考にさせていただきましたのでぜひご覧ください。
以上、私が使っているコンフィギュレーション・テーブル機能なります。
もちろんこのシュミュレーションで再現できないこと(例えば負の数の入力が対応していないのです…)もあるので機械設計の際に簡易的に確認できる程度ですがSOLIDWORKSという1つのソフト上で確認できるのは便利だと考えています。